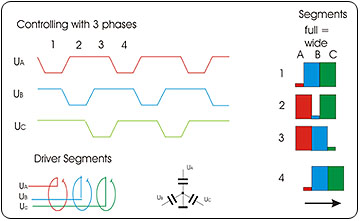
When the device is moving,
some
segments are in contact with the surface while others are
not. In order to generate a continuous motion, the segments which
are not in contact with the surface move to a new position.
The motion of the device is similar to a wave flowing in longitudinal
direction and the maxima of these waves are in contact with this
surface. A moving wave displaces maxima and minima in the direction
the worm is creeping and shows the movement of the worm in relation
to its environment.
This means, that some periods of the wave, at least fragments
of it, are moving along the surface of the device.